| 【Shi | 您所在的位置:网站首页 › opencv sift参数 › 【Shi |
【Shi
|
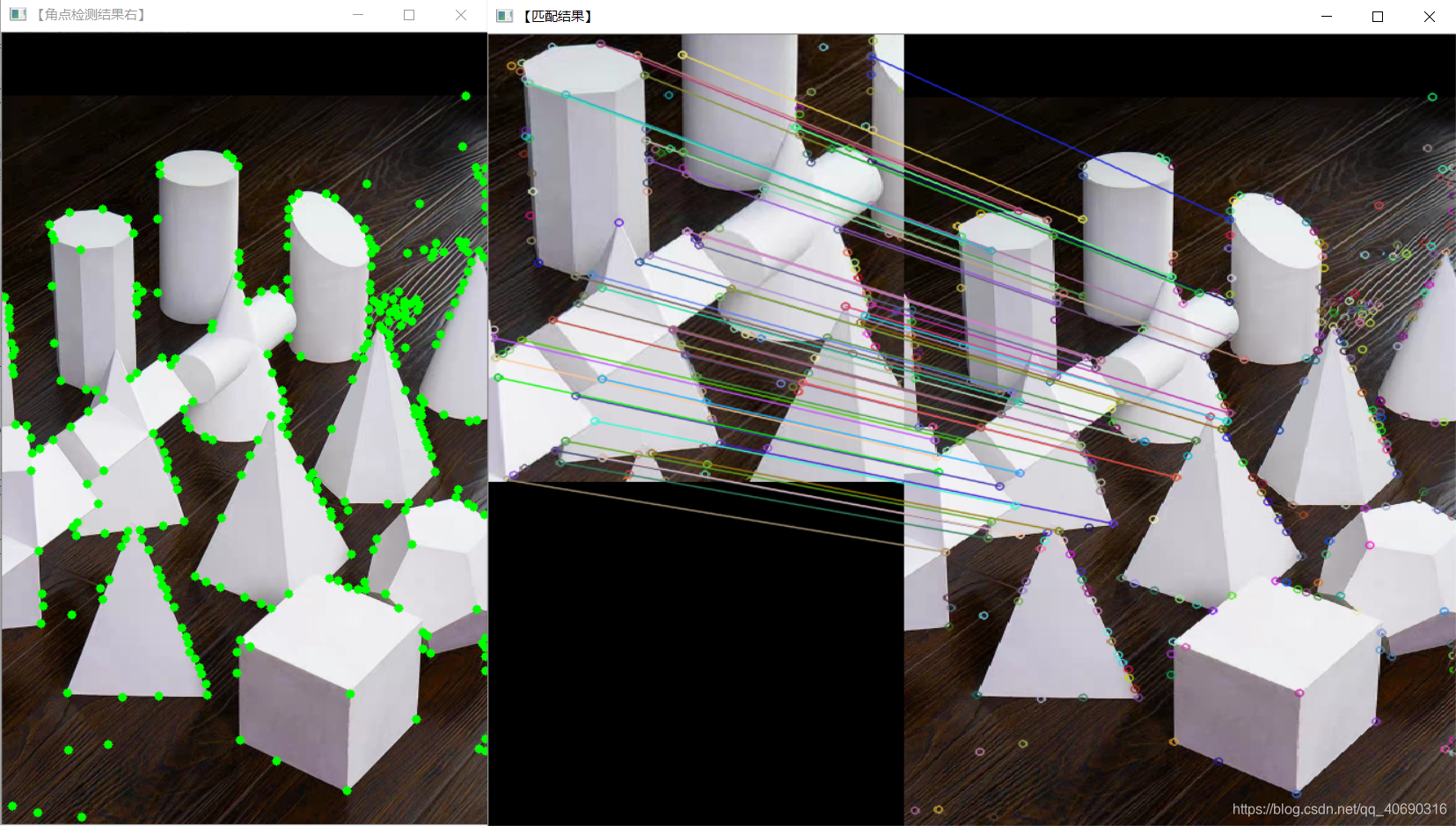
在进行SIFT特征提取时,由于会提取数量较多的尺度空间特征点,会导致特征向量提取和特征点匹配环节的用时较长。在三维测量等应用条件下,角点是进行测量的关键点,因此采用Shi-Tomasi或Harris角点检测提取关键的特征点,可以减少冗余无效的特征点,提升运算的实时性。接下来介绍在编程时遇到的两个问题: 1.如何用角点提取结果生成特征描述子Shi-Tomasi角点检测函数如下: goodFeaturesToTrack(Left_Corner_graysrcImage,//输入图像 Left_Corners,//检测到的角点的输出向量 g_maxCornerNumber,//角点的最大数量 qualityLevel,//角点检测可接受的最小特征值 minDistance,//角点之间的最小距离 Mat(),//感兴趣区域 blockSize,//计算导数自相关矩阵时指定的邻域范围 false,//不使用Harris角点检测 k);//权重系数可以看到角点提取的结果是 vector这一类型的动态数组,而SIFT特征匹配的特征点输入是KeyPoint类 CV_WRAP KeyPoint(); /** @param _pt x & y coordinates of the keypoint @param _size keypoint diameter @param _angle keypoint orientation @param _response keypoint detector response on the keypoint (that is, strength of the keypoint) @param _octave pyramid octave in which the keypoint has been detected @param _class_id object id */因此需要进行转换。但是,若使用KeyPoint::convert()进行转换或直接使用detectandcompute()函数,转换出来的特征点仅有一个Point2f类型的成员变量pt即坐标信息被输入,很多重要的参数,如主方向、尺度空间信息没有输入。因此用先detect后compute的方法或者使用父类Features2D下的另一个成员函数detectandcompute(),进行特征检测的结果都不具备旋转不变性,只能应用于双目对齐后的左右视图,现详细分析detectandcompute()函数: 1.1 detectandcompute()函数函数的参数如下: CV_WRAP virtual void detectAndCompute( InputArray image, InputArray mask, CV_OUT std::vector& keypoints, OutputArray descriptors, bool useProvidedKeypoints=false );最后一个参数布尔变量useProvidedKeypoints是用于判定是否使用其他检测方法检测出的特征点信息进行输入,若为false则代表使用SIFT特征检测的结果作为输入,若为true则代表采用外源输入。下面这一部分是useProvidedKeypoints为true即采用外源输入的代码: if( useProvidedKeypoints ) { firstOctave = 0; int maxOctave = INT_MIN; for( size_t i = 0; i Left_Matches.push_back(Left_Keypoints[matches[i].queryIdx].pt); Right_Matches.push_back(Right_Keypoints[matches[i].trainIdx].pt); } Mat H = findHomography(Left_Matches, Right_Matches, CV_RANSAC); vector mask(Left_Matches.size()); vector Left_Matches_Aftertrans; perspectiveTransform(Left_Matches, Left_Matches_Aftertrans, H); for (int i = 0; i mask[i] = 1; } } Mat img_matches; drawMatches(Left_Corner_srcImage, Left_Keypoints, Right_Corner_srcImage,Right_Keypoints, matches, img_matches, Scalar::all(-1), Scalar::all(-1), mask, DrawMatchesFlags::DEFAULT);匹配结果: |
 该工程的代码可以在我的github主页上看到: https://github.com/Yaoevol/Detect_and_Match
该工程的代码可以在我的github主页上看到: https://github.com/Yaoevol/Detect_and_Match【本文地址】
公司简介
联系我们